Using LiDAR TFMini with CASP
This example project demonstrates how to measure distance of an object with TFMini LiDAR sensor using CASP. TFMini Plus is also supported by CASP and can be used in similar manner.
Target
Arduino Leonardo is used in this project. However, any supported micro-controller board can be used. Please note that Arduino Uno cannot be used if USB serial is enabled.
Description
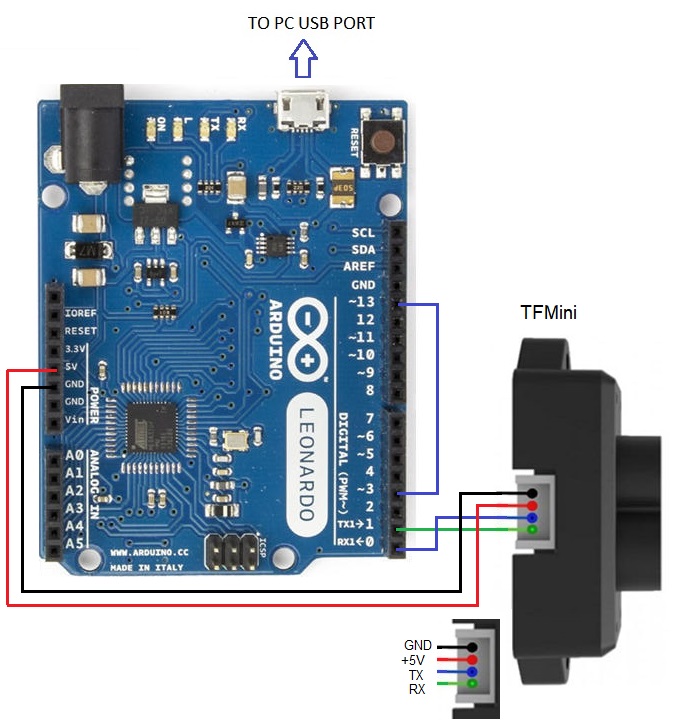
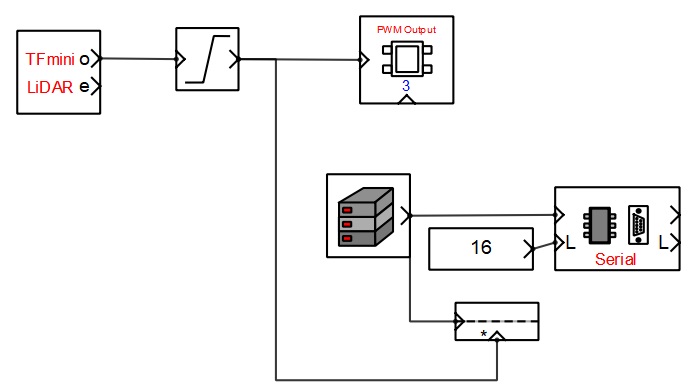
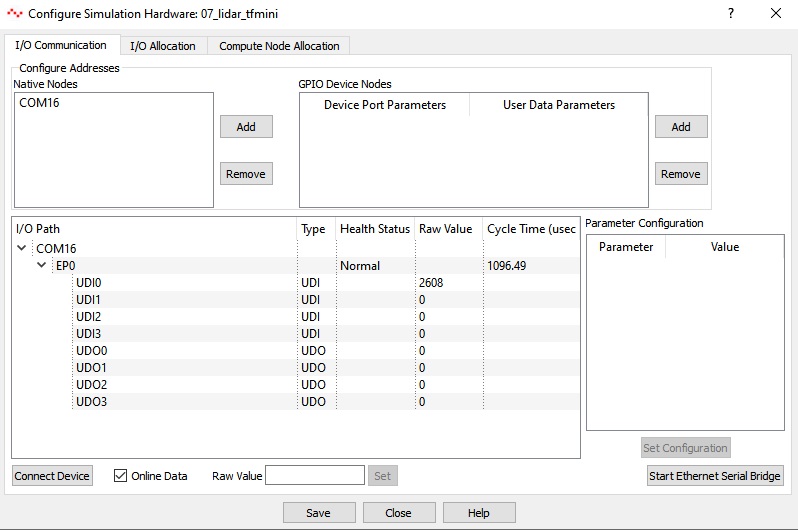
TFMini is connected to the target board as shown in the circuit diagram. A model is developed to measure the distance of the target object from the sensor and vary the brightness of the on-board LED such that as the object comes closer to the sensor LED brightness increases. The measured data is also send to the serial port. User can see the measured data from the ‘Configure Simulation Hardware’ interface window by clicking on Simulation->Configure Simulation IO menu item from the CASP main tool bar. Please go through the individual block parameters used in the model along with respective documentation for better understanding.
By default TFMini gives output in terms of centimeters. To change this and to configure other parameters, perform the following steps on TFMini block:
1. From TFMni block parameters, select Mode as ‘Configuration Mode’. Also, select Detection Mode as 0-5Mtr (15X) from TFMini Configuration Group.
2. With these parameters program the target. After the board is programmed wait for 10secs.
3. Now, from the TFMni block parameters, select Mode as ‘Normal Mode’ and program the target. Now, distance should be measured in millimeter.
Circuit Diagram
Model
Screen shot of the Configure Simulation Hardware window
References
Please go through our video tutorials, tutorial projects and CASP main documentation for getting started with CASP.