Using LiDAR-360o with CASP
This example project demonstrates how to interface with YDLIDAR 360o 2D range finder and display corresponding point cloud plot with CASP.
Target
Native Desktop PC
Description
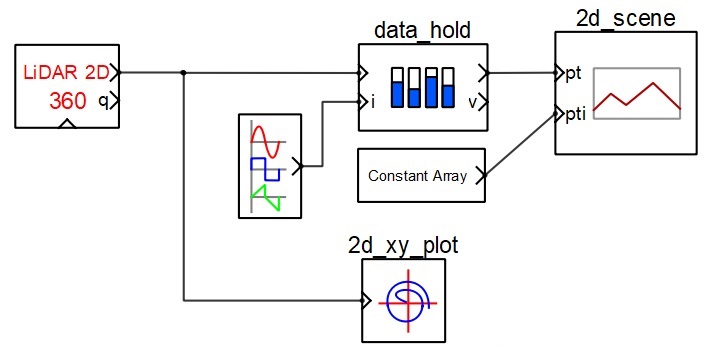
A YDLIDAR LiDAR 360o range finder is connected to the host PC through USB interface. It appears as a serial interface on the host PC. A model is developed on the host PC to communicate with this device, process the point cloud data received from the device and display the data. Please go through the individual block parameters used in the model along with respective documentation for better understanding.
Circuit Diagram
Model
Output
References
Please go through our video tutorials, tutorial projects and CASP main documentation for getting started with CASP.